Capteurs Ultrasons
23Sep
Que sont les ultrasons ?
Les ultrasons font partie des ondes acoustiques qui correspondent àune perturbation mécanique (onde de compression-dilatation du milieu) qui se propage dans un milieu matériel.
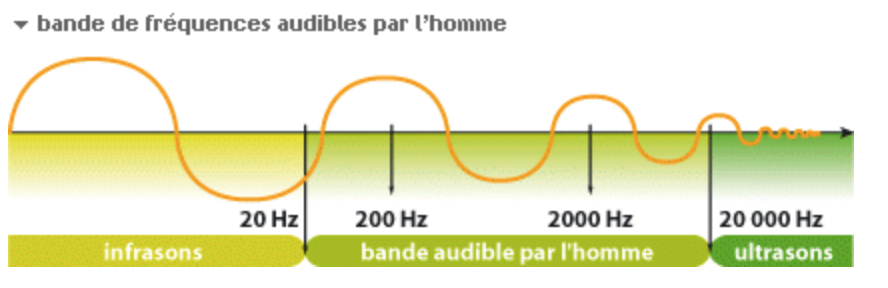
Les ultrasons sont des ondes inaudibles pour l'homme, car de fréquence supérieure à 20 000 Hertz (limite de la perception pour l'homme). Elles sont notamment utilisés comme système de localisation par certains animaux comme les chauves souris ou les dauphins qui sont capables d'en émettre et de les percevoir afin caractériser leur environnement.
Comment ça marche ?
Les ondes sonores et ultrasonores sont produites par les vibrations périodiques d’un solide qui successivement comprime et détend la couche d’air avec laquelle il est en contact. Cette couche d’air comprime puis détend à son tour la couche d’air voisine avant de retrouver son état initial puis le phénomène se produit avec les couches d’air suivantes permettant ainsi la propagation de l’onde. Seule la fréquence diffère entre une onde sonore et une onde ultrasonore.
Domaines d'applications
Les ultrasons sont employés dans des applications médicales (échographie, kinésithérapie, etc.), dans des applications industrielles (nettoyage de pièces, contrôles non destructifs, etc.) ou dans l'automobile (repérage d'obstacles). C'est ce dernier domaine qui nous intéresse.
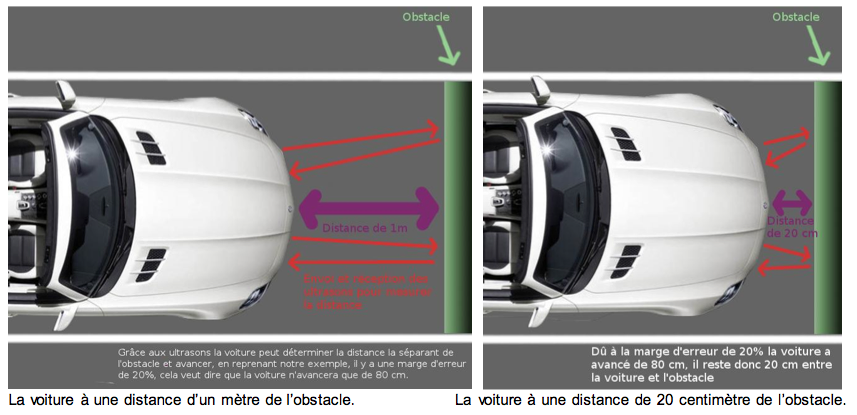
Pour la voiture autonome, les ondes sont émises par un émetteur appelé sonar, puis réfléchies par des obstacles, et enregistrées par un récepteur. Ce système permet à la voiture de calculer la distance à laquelle elle se trouve des objets. Les ultrasons permettent donc de repérer les obstacles même dans des conditions difficiles telles que des intempéries ou par luminosité très faible, par exemple la nuit. Cependant, ces ondes ont une faible portée (2 m à 5 m) et permettent seulement de visualiser l'environnement proche ; on dit qu'elles couvrent l'environnement direct du véhicule, et ils ne fonctionnent qu'à faible vitesse.
Ils sont donc utilisés pour le stationnement de la voiture.
Démarche expérimentale pour comprendre les capteurs ultrasons
Voici une expérience réalisée le 10 Décembre 2018 qui nous a permis de démontrer qu'en connaissant la vitesse des ultrasons on peut retrouver la distance qui sépare un capteur d'un obstacle.
Matériel :
- oscilloscope
- générateur
- capteur d’ultrasons
- émetteur d’ultrasons
- écran noir en guise d'obstacle
Données :
On sait que la vitesse des ondes sonores à température ambiante (20°C) est de 343,3 m/s.
On sait également calculer une distance grâce à la formule d = v x t.
Protocole :
Nous plaçons un émetteur et un récepteur à une distance donnée d'un écran représentant un obstacle.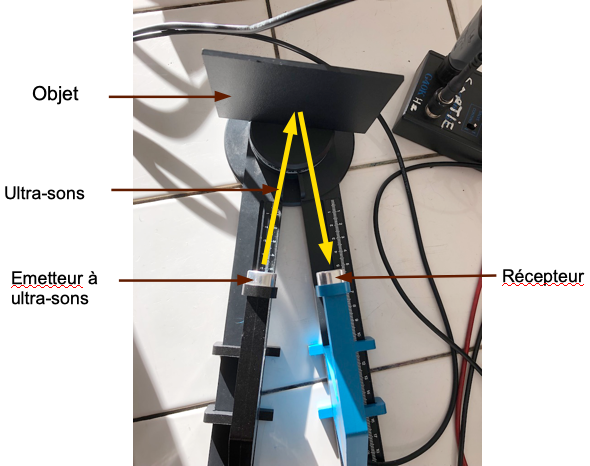
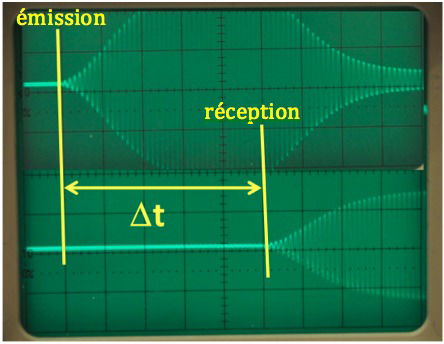
Puis nous mesurons le temps écoulé entre l'émission et la réception des ultrasons grâce à l'oscilloscope (lecture du temps d'une période sur l'oscilloscope).
Nous pouvons donc déterminer une distance approximative entre les capteurs et l'objet en n'oubliant pas de diviser le résultat de la formule par 2 car les ondes font un aller-retour ( émetteur-écran écran-récepteur )
Calculs :
Prenons comme exemple la première ligne du tableau avec un temps aller-retour pour les ondes de 0,3 ms soit 3 x 10-4 s
d = 343,3 x 3 x 10-4 = 0,10299 m ≈ 10,3 cm
La distance entre les capteurs et l'objet est donc 5,15 cm (10,3 / 2)
Nous avions placé l'objet à exactement 5 cm des capteurs donc il faut compter une marge d'erreur.
Résultats :
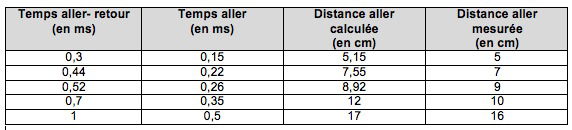
Analyse des résultats :
Cette expérience nous a permis de comprendre le fonctionnement des capteurs ultrasons et nous a appris la méthode de calcul d'une distance entre la voiture et l'obstacle. En effet, toutes les opérations que nous avons effectuées seront prises en charge par l'ordinateur de bord de la voiture. Cependant, les calculs devront être fait en temps réel et en continu car celle-ci sera en mouvement permanent, contrairement à l'expérience que nous avons menée. Nos résultats nous permettent également de dire que les capteurs ne sont pas très précis et qu'il faudrait compter une marge d'erreur variable (2-3 cm).
Avantages et inconvénients des ultrasons :
Traitement simple des données
Peu coûteux
Cône d'émission large ce qui est avantageux pour la détection d'objets rapprochés
Cependant,
Sensibilité aux conditions météorologiques (la vitesse des ondes sonores varie en fonction de la température et cela influe donc sur le calcul de la distance)
Faible portée