Capteurs LIDAR
29Sep
Les capteurs Lidar (Light detection and ranging qui signifie détection et estimation de la distance par la lumière ) sont essentiellement utilisés dans l'automobile pour la détection des obstacles et l'estimation des distances.

Comment ça marche ?
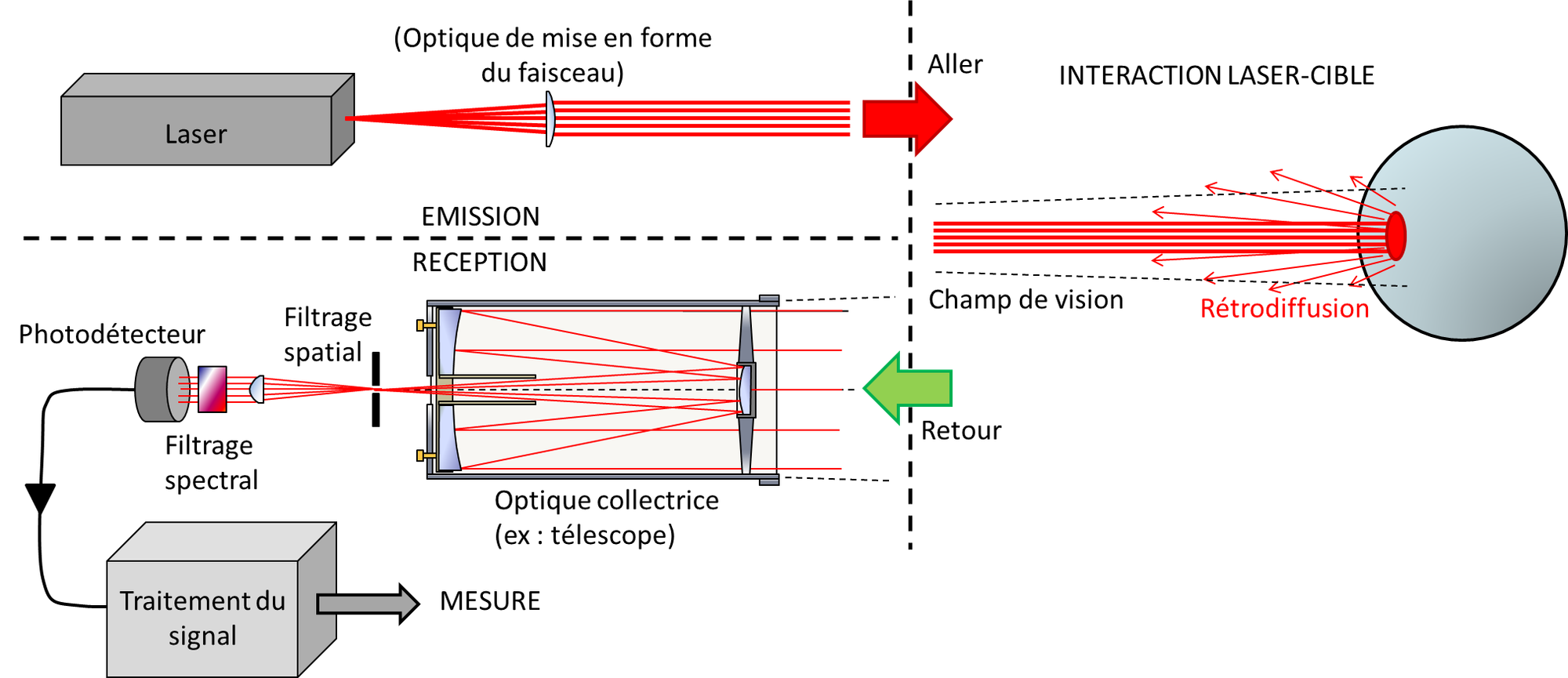
Le Lidar est basé sur un faisceau de lumière ou laser en rotation (ondes électromagnétiques rayonnant dans les domaines infrarouge ou ultra-violet ) qui est invisible à l’œil nu et qui est projeté sur les alentours. Ces capteurs sondent l’environnement en projetant une lumière sur les objets, et en calculant le temps qu’il faut aux ondes lumineuses pour rebondir sur ces derniers et revenir à l'émetteur. (Distance = Vitesse de la lumière x Temps).
Un Lidar est composé principalement de 2 éléments : un émetteur laser (fonction d’émission) qui envoie un signal lumineux et un récepteur comprenant un collecteur de lumière qui reçoit la lumière réfléchie.
Le signal reçu doit être analysé, ainsi on trouve après le télescope un système électro-optique d’acquisition : un photo-détecteur qui transforme la lumière en signal électrique ainsi qu’une chaîne électronique qui traite ce signal pour obtenir l’information recherchée.
Avantages et inconvénients du Lidar :
Le Lidar bénéficie d'une grande précision dans la mesure de distance même sur une longue portée (une précision de l’ordre du centimètre).
Il est indépendant de la luminosité (On peut effectuer certaines mesures en plein jour ou la nuit).
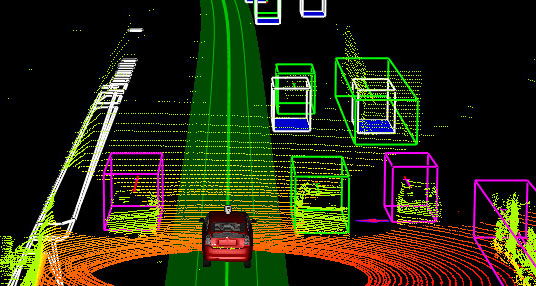
Ils permettent d'obtenir une vue détaillée de l'environnement de la voiture sous forme de cartographie 3D grâce à la rapidité d’acquisition et au traitement des données avec une extrême précision.
Cependant,
Il nécessite une rotation constante pour permettre une vue a 36O°. Ce n'est donc pas très esthétique sur le toit de la voiture.
Le Lidar est sensible aux conditions météorologiques. Ainsi par temps de pluie ou de brouillard, le faisceau peut être perturbé, à cause du principe de réfraction : lorsque le rayon traverse un milieu différent (comme une goutte d’eau), la vitesse de l’onde change, et ainsi la superposition de différentes couches de différents milieux rend approximatif l’évaluation de la distance.